AutoRallyNotebook
Active Safety for Autonomous and Semi-Autonomous Vehicles
- Georgia Tech Vertically Integrated Project (VIP) - Spring 2021
- Lead: Dr. Panagiotis Tsiotras - tsiotras@gatech.edu
- Name: Ahmed Khalaf - ahmed.khalaf@gatech.edu
- Subteam: AutoRally#2 (MPC motion planning) - Subteam lead: Jacob Knaup - jacobk@gatech.edu
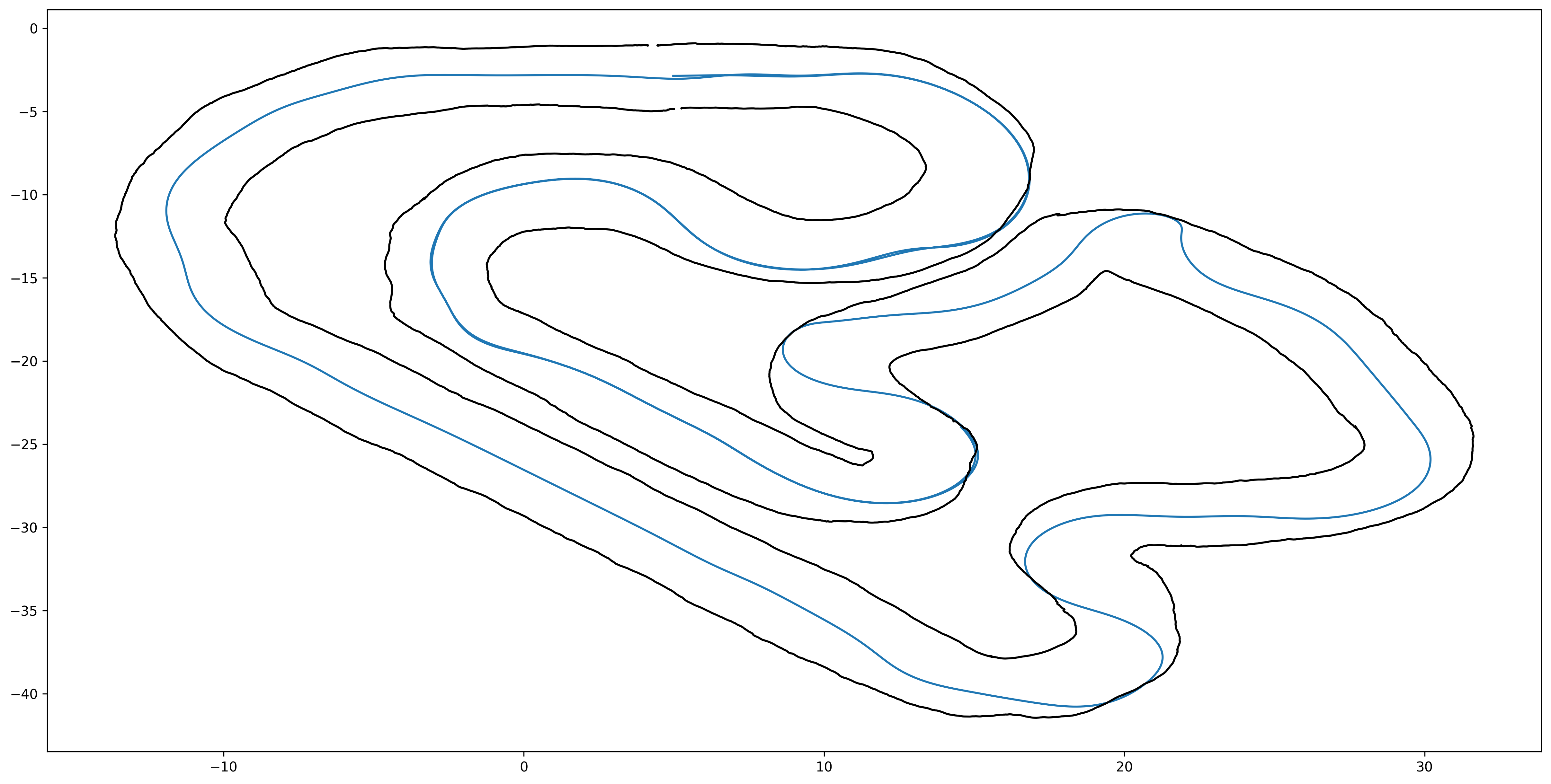
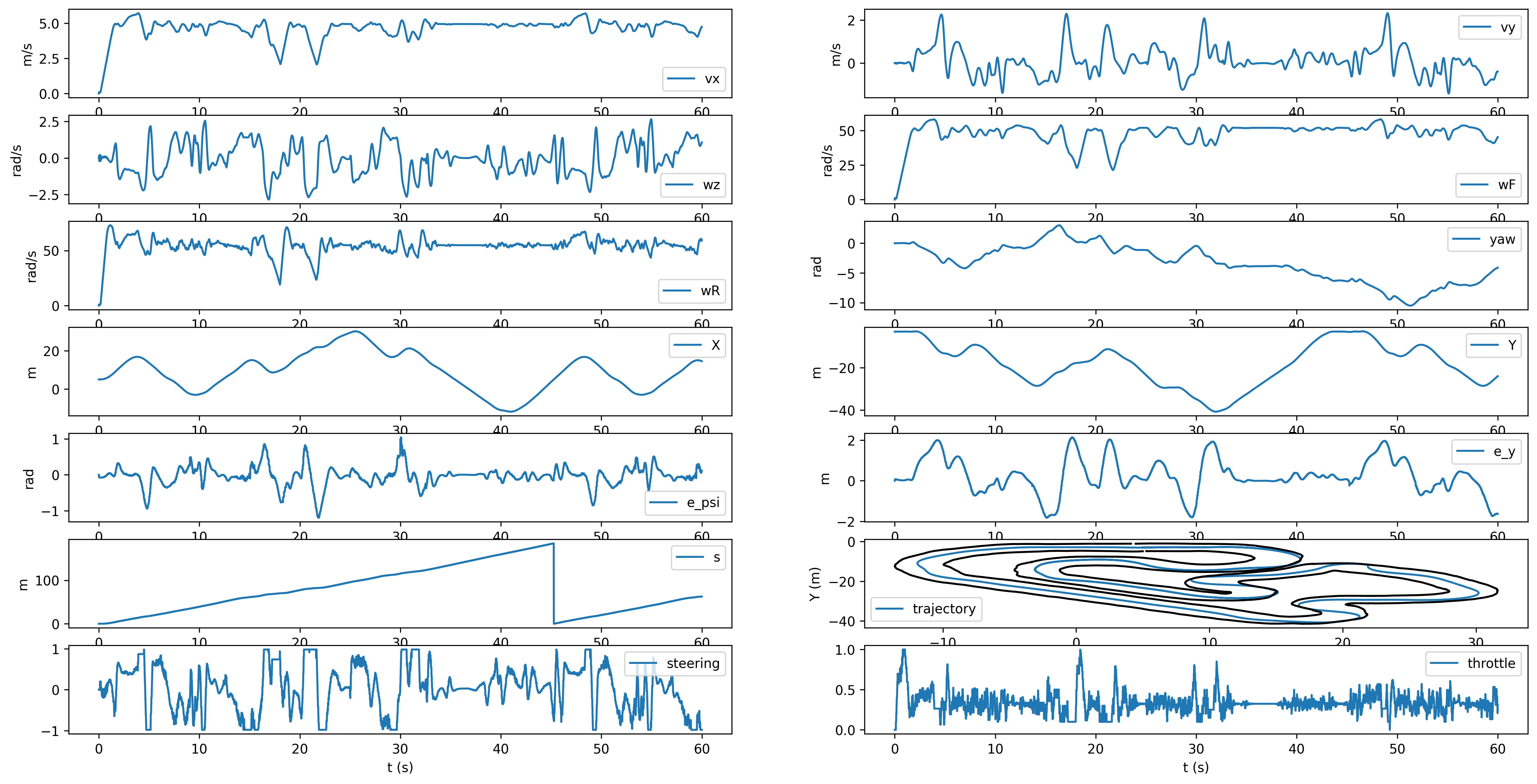
Before: Starting point (Feb 2021)
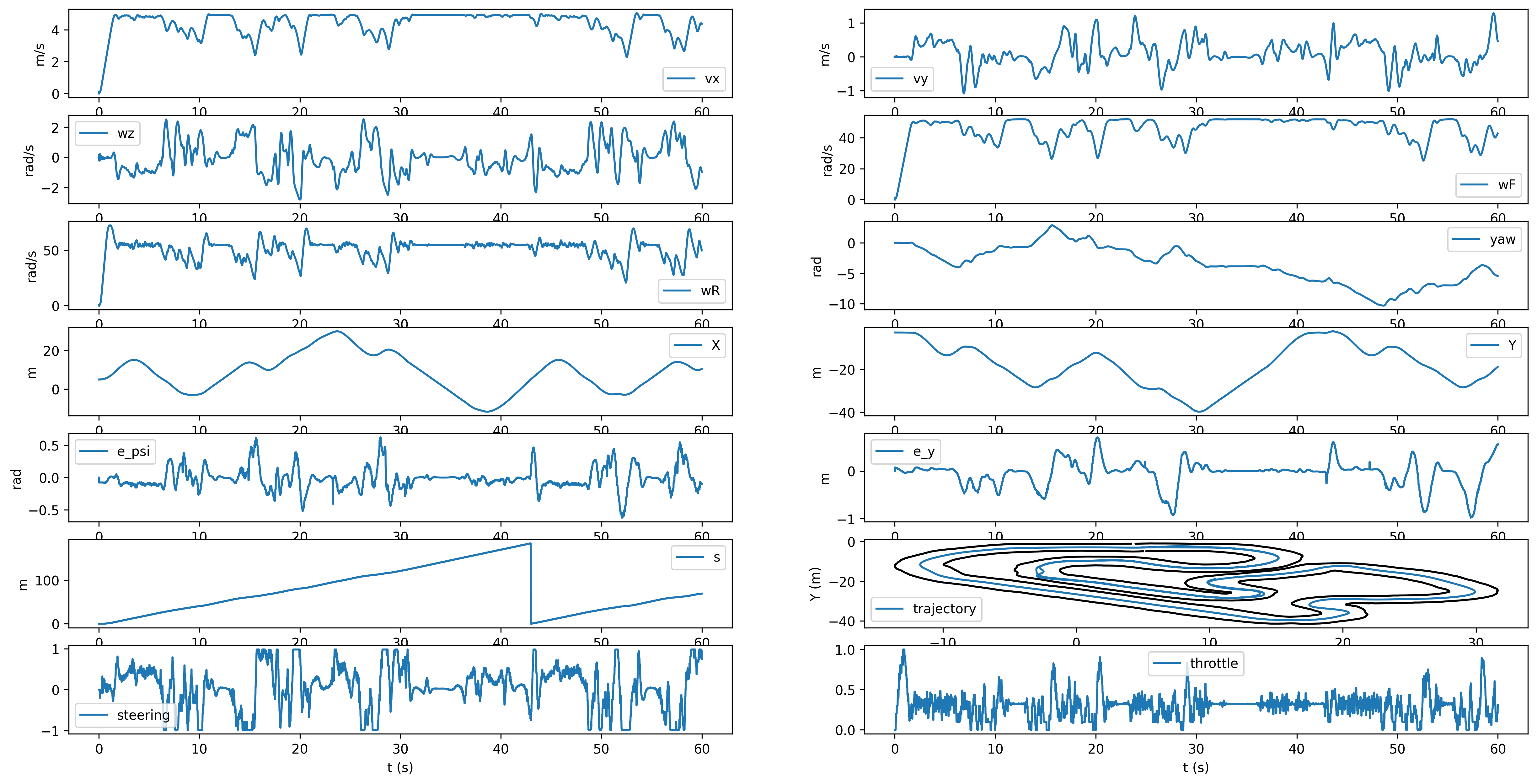
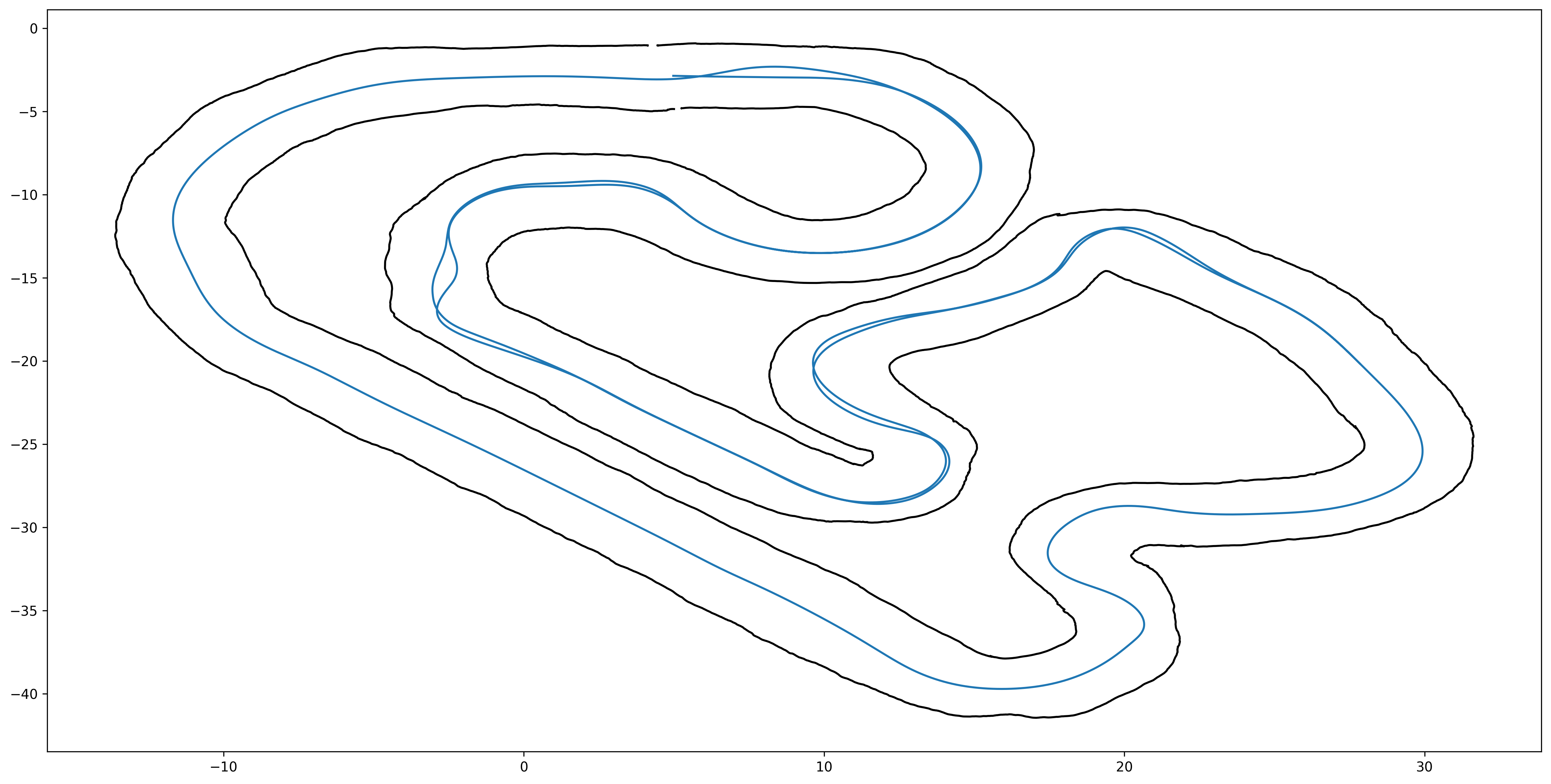
After: [Spoiler Alert!] Results on more complex Race track (Dec 2021)
After introducing multi-shot receding horizon control with safety hard constraint.
Design Notebook / Progress log
Jan, 26
Team event: Subteams assigned
Jan, 27
Subteam event: First subteam meeting.
Todos
- Build autorally public repo locally
- J. Knaup to send over a paper and code for the LTV MPC controller
- material and code to be studied
Jan, 28
Collected materials to study until more concrete stuff is available from Jacob.
Review MPC section from my Self-Driving car nanodegree material
https://www.udacity.com/self-driving-car
Notes: MPC controls both acceleration and steering based on Waypoints from traj. planning node.
Code: https://github.com/udacity/CarND-MPC-Project
Self-study material references:
Melanie Zeilinger: “Learning-based Model Predictive Control - Towards Safe Learning in Control”
Institute for Pure & Applied Mathematics (IPAM) - Intersections between Control, Learning and Optimization 2020
Notes:
- very interesting lecture, TODO: what’s GP and QP?
- learning part used for parameters could be Deep-learning or similar
- physics first-principles part for control and constraints
- MPC controller gets contraints (hard) from evnironment –> safety
Lecture video: https://www.youtube.com/watch?v=nO8r8XKlPgA&ab_channel=InstituteforPure%26AppliedMathematics%28IPAM%29
Model Predictive Contouring Controller (MPCC) for Autonomous Racing developed by the Automatic Control Lab (IfA) at ETH Zurich
Notes:
- C++ implementation, Matlab Simulation
- Solver runs on remote PC, not embedded in the car
- algorithm seems similar to what jacob described
Video: ORCA - Nonlinear MPCC “How it works”
Code: https://github.com/alexliniger/MPCC

Feb, 5
Received code and paper Falcone, 2007 from J. Knaup
Notes:
- Implementation is in Matlab. Check how we get this running in the car? Autocoder?
- Paper mentions tire fricition, how do we estimate that at runtime?
- TODO: Install matlab and refresh
- TODO: Find material on MPC design in matlab
Feb, 7
Self-study material references:
MPC Implementation workshop by Mohamed W. Mehrez, PhD
Notes:
- Single shot vs. multishot
- Constraints are tricky to get right
- Optimizer might get stuck, approximate vs. exact?
Code: https://github.com/MMehrez/MPC-and-MHE-implementation-in-MATLAB-using-Casadi/tree/master/workshop_github
Full playlist:

Mathworks Matlab MPC toolbox
Notes: Very nice short video series to get started with MPC basics Video playlist
Matlab Documentation mainly, but still some generic MPC concepts are well-explained
MPC Toolbox About MPC:
Feb, 9
TODO
- Check with Jacob what does Matlab code has to do with Autorally?
- Review with Jacob understanding of Falcone, 2007
Feb, 10
Subteam event: meeting with J. Knaup
- Code is just to understand MPC
- Actual MPC for us will be in C++ ROS node for high-level planning .. low level controllers for motors ..etc are out of scope
- NN used for system identification
- TODO: Run simulation and inform Jacob when ready
Feb, 14
- ROS installation in VMware is too slow, build another VM with GPU HW acceleration.
- Gazebo crashes in VMware with GPU HW acceleration!
- TODO: check how to run GUI applications, Gazebo and RQT seem to be required
- container is faster but several configuration issues to get GPU accelration for MMPI controller
- TODO: try VM on more powerful computer
Feb, 15
Team event: bi-weekly team meeting
- Current LTVMPC implementation drives fine on Marietta track, but slow on CCRF track.
- I will be working on tuning MPC controller in order to drive faster on CCRF track. Notes
- TODO: Find out if I can run simulation locally?
- TODO: What’s the difference bet. Marietta and CCRF tracks?
- TODO: Prepare status slides for meetings in the future.
Feb, 16
Todo: how to formulate faster progress on the track? traj. tracking?
Self-study material references:
- Christ et al., 2019 Time-optimal trajectory planning for a race car considering variable tyre-road frictioncoefficients, Vehicle System Dynamics
- CHEN et al., 2020 MPC-based path tracking with PID speed control for high-speed autonomous vehicles considering time-optimal travel
- Kapania et al., 2016 A Sequential Two-Step Algorithm for Fast Generation of Vehicle Racing Trajectories
- Verschueren, 2015 Towards time-optimal race car driving using nonlinear MPC in real-time
- Velenis, E., and Tsiotras, P., 2008 Minimum-timetravel for a vehicle with acceleration limits: Theoretical analysis and receding-horizon implementation
TODO: review papers and send them to Jacob for discussion
Feb, 19
New info from Jacob:
- For what we are doing, you don’t need to run Gazebo or MPPI
- Code not available in public repo (Not the MPPI Controller)
- New code repos provided as archives (snapshot from working stuff on Jacob’s side)
- TODO: build Autorally-private in same catkin workspace with Autorally repo
Feb 20
- Building private code fails
- Error CMAKE_CUDA_DEVICE_LINK_EXECUTABLE –> What do we need GPU for? TODO:
- Check with Jacob reg. dependencies, compiler version ..etc
Feb, 23
Managed to run the code from Jacob, LTVMPC results look really sad
Feb, 26
Subteam event: meeting with Jacob
Notes:
- No need to push to repo for now (strange!)
- Target speed 5m/s doesn’t work. Set target speed 2.5m/s
- TODO: Join slack channel
- TODO: Provide several runs with target speed 2.5m/s to Jacob
- Not sure why trajectory isn’t optimal even if target speed is low and weight of error in y = 0? TODO: Investigate
- Discussed proposals for progress toward time-optimal:
- Tracking a certain target speed isn’t important - Agreed
- Tracking distance from center lane isn’t important - Agreed
- Change model into time-independent model (like Verschueren, 2015 ) - Jacob not sure it’s a good idea, seems too much work and we linearize anyway
- I proposed trying to add change parameters/cost function to memics the same effect (emphasis on distance traveled)
Results are much better with speed set point 2.5m/s
Mar, 1
Team event: bi-weekly team meeting
- TODO: maintain environment/dependencies installation steps in prep_env.sh
- Feedback from J. Knaup, performance baseline with 5m/s is better than my screenshots, controller might be running slow (simulation and code run in realtime not sim time)
Mar, 2
- TODO: Deep dive into the implementation
- Seems we’re using CVXGEN, apply for educational license
Mar, 4
- Changing problem formulation in CVXGEN to maximize travel on the track, still unstable results despite contraint on lateral position to be within track width.
- Seems the scope of work will go beyond parameter tuning
- TODO: review MPC and Optimization material
- TODO: modify speed based on curvature? (increase in straight sections, decrease in acute curved sections)
- TODO: check where targets are coming from to the solver?
Mar, 12
Notes on expirement with agressive target S
- Adding target on state variable (s) improves results are getting better (faster), but still unstable
- Target is calculated with curvature speed modifier (TODO: not sure this is a good idea, can be confusing to the solver?)
-
Increasing the weight of target S improves speed as expected (since S is calculated with more agressive speed in straight sections?)
- TODO: review with Jacob what might be the reason
- TODO: expirement with extreme cases (target speed very low/high, on straight/acute section ..etc) in order to identify root cause
- TODO: include results and explaination in slides for Monday meeting.
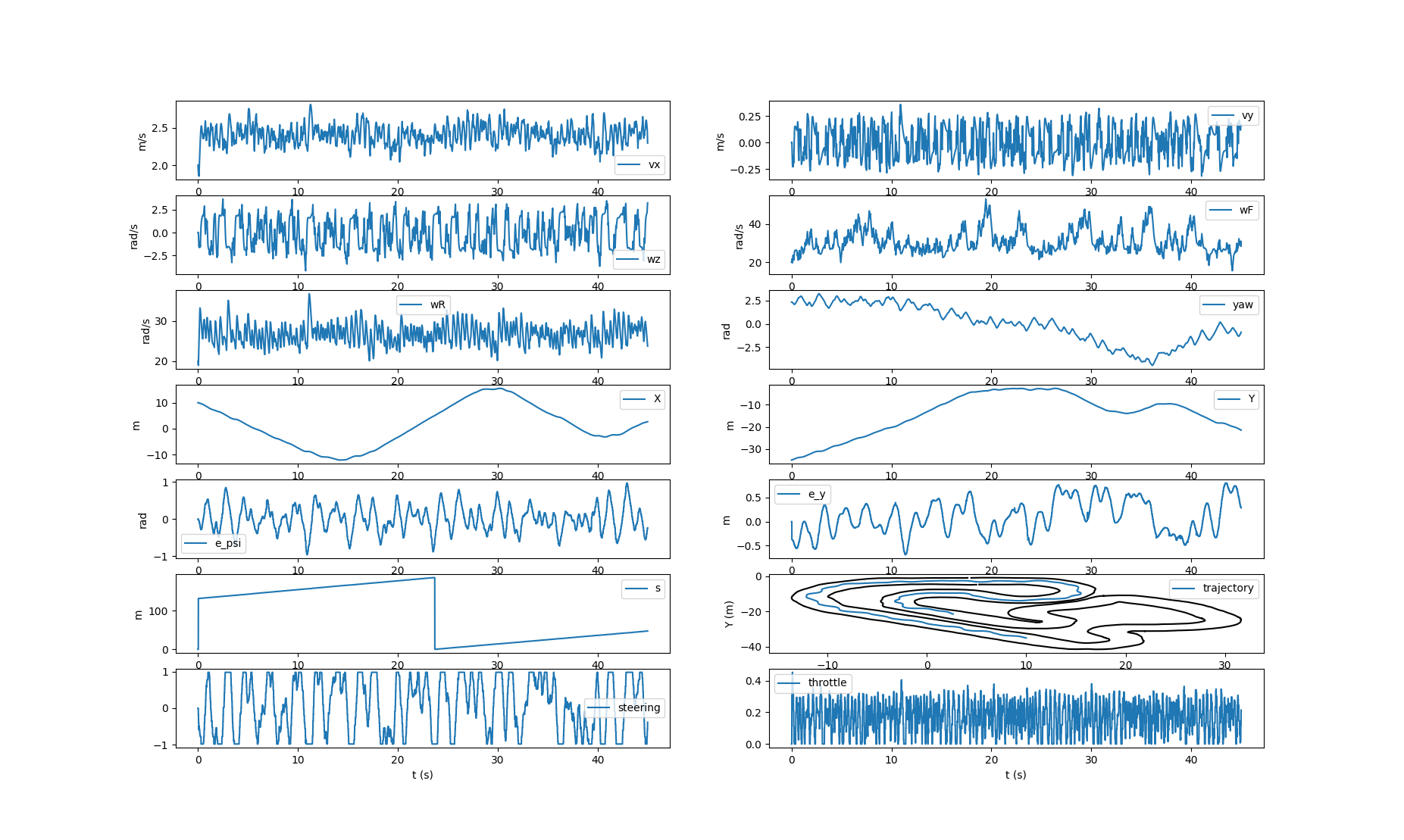
Simulation Result with cost function weight 5.0 on Vx only:

Simulation Result with cost function weight 5.0 on Vx and 1.0 weight on S
Simulation Result with cost function weight 3.0 on Vx and 1.0 weight on S
Mar, 13
- TODO: expirement with multishot rather than single-shot
Mar, 15
Team event: bi-weekly team meeting
- presented LTVMPC_CW.pptx, no major comments
- TODO: Prof. asked for better visualization (track top-view)
Mar, 16
Notes from expirements:
- Adding target on difference of initial and terminal state variable (s) might be better than a single target for the whole horizon, TODO try it?
- Setting terminal cost to zero improves the unstable/strange results
- From J. Mattingley, Y. Wang and S. Boyd, 2010 Receding Horizon Control AUTOMATIC GENERATION OF HIGH-SPEED SOLVERS:
For some problems, stability guarantees can be obtained by adding specific terminal costs and constraints. Terminal costs and constraints also allow simpler, shorterhorizon controllers to approximate the behavior of controllers with longer horizons.
- TODO: discuss how important is it with Jacob.
Mar, 17
Subteam event: meeting with Jacob
- TODO: push changes to autorally private repo, Nolan shall provide access
Mar, 20
Updated CVXGEN to multishot and cost term for dS = quad((Sterminal_target - Sinitial_target) - (Sterminal - Sinitial))
Notes from simulation expirements with multi-shot
- Speed isn’t greatly improved compared to baseline but faster than target S and better handling and stays in track than both
- Simulation with with multi-shot + dS term doesn’t yield faster result, TODO: additional tuning needed?
- TODO: make all options (weights for State variables, Terminal stats, dS ..etc) available as configuration parameters for better expirementation
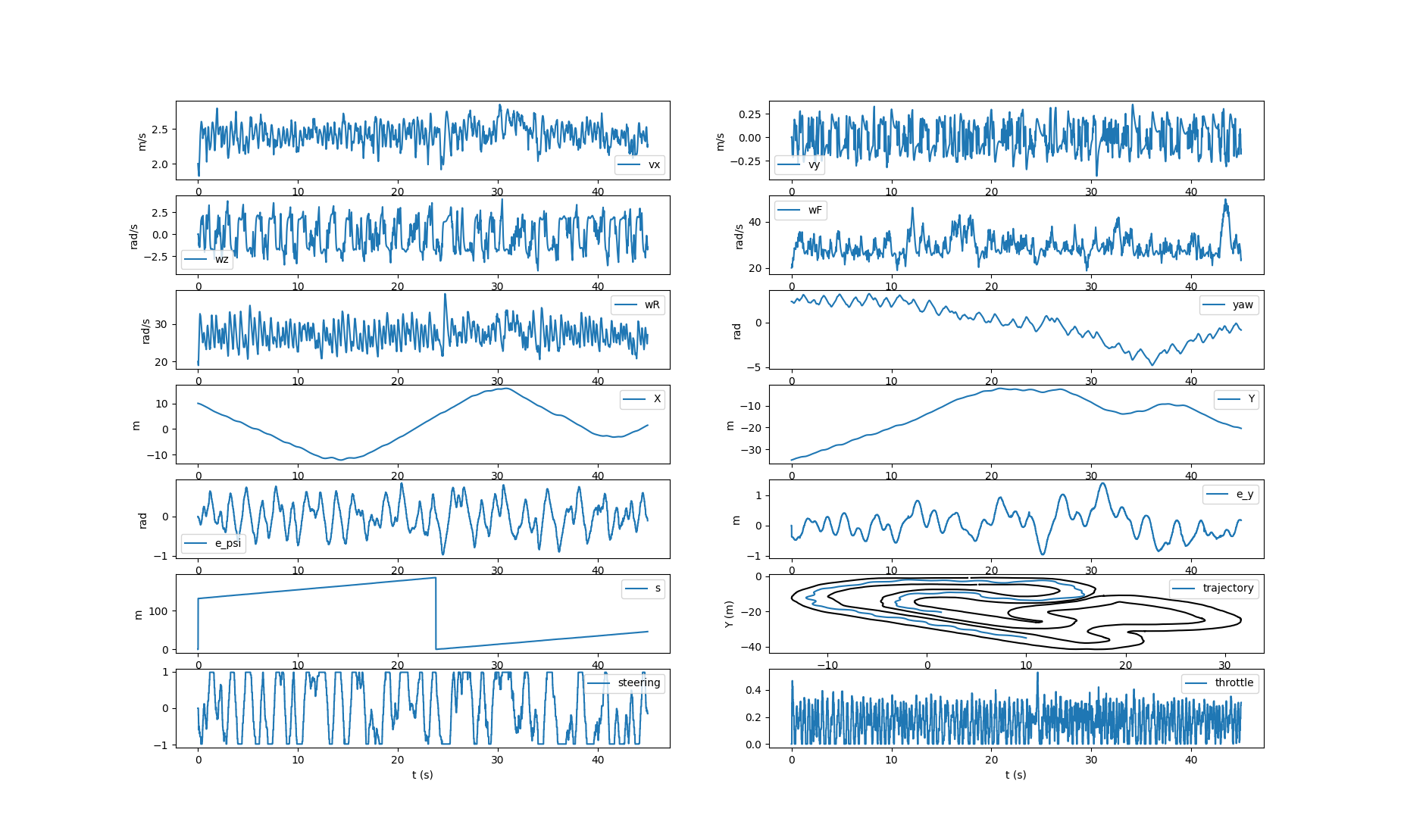
Simulation Result multishot:
Simulation Result multishot + dS term:
Mar, 29
Team event: bi-weekly team meeting
- presented LTVMPC_CW2.pptx, no major comments
- J. Knaup commented: too wiggly, TODO: meet to discuss what’s causing that
- TODO: provide the modifications directly, for some reason it’s not possible to get write access
Apr, 1
Provided snapshot of code, simulation data: param configuration and results
https://drive.google.com/file/d/1xYH4obNJ-CdsZgzQLf75BU93-yluHrvm/view?usp=sharing
Apr, 12
Seems execution time impacts the output greatly, TODO: rebuild envirnoment on a Core-i7 machine with clean ubuntu install to confirm.
Jacob created a private repo: https://github.gatech.edu/jknaup3/autorally_private-ahmed
TODO: clone and sync with this one
Apr, 14
Subteam event: meeting with Jacob
- Jacob: curvature map is not the right one for CCRF
- TODO: calculate curvature instead of using the map
Apr, 19
- TODO: Use Heron’s formula, calculate curvature for each S from 3 points (actual point one before and one after)
- K = 4 * Area / ABC where A,B,C are the triangle side lengths
- Ref. from Jacob for X,Y -> S,n calculations : https://ieeexplore.ieee.org/abstract/document/8317775
Apr, 20
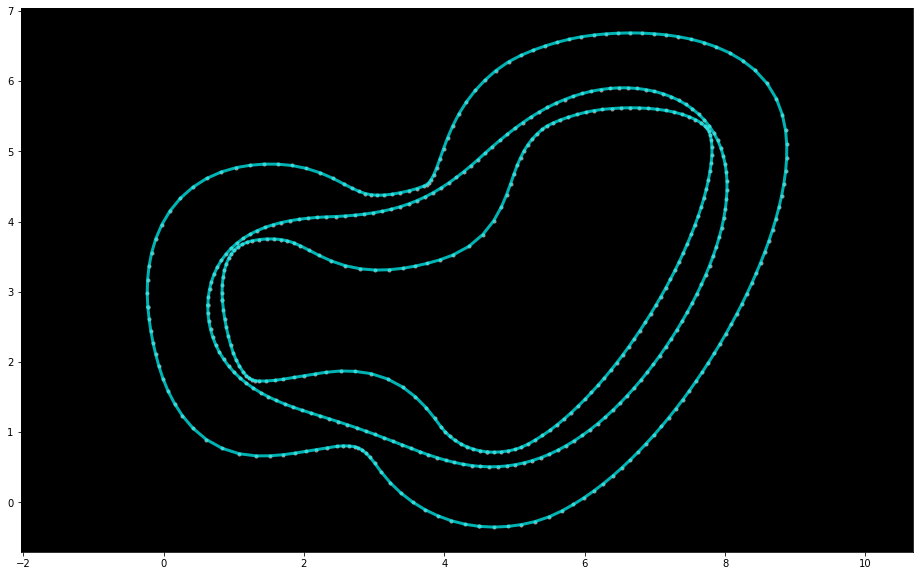
- Curvature calculation will not be smooth using raw data
- TODO: Try another optimization based curve fitting approach with segments with min of 3 points and 5m or 4m?
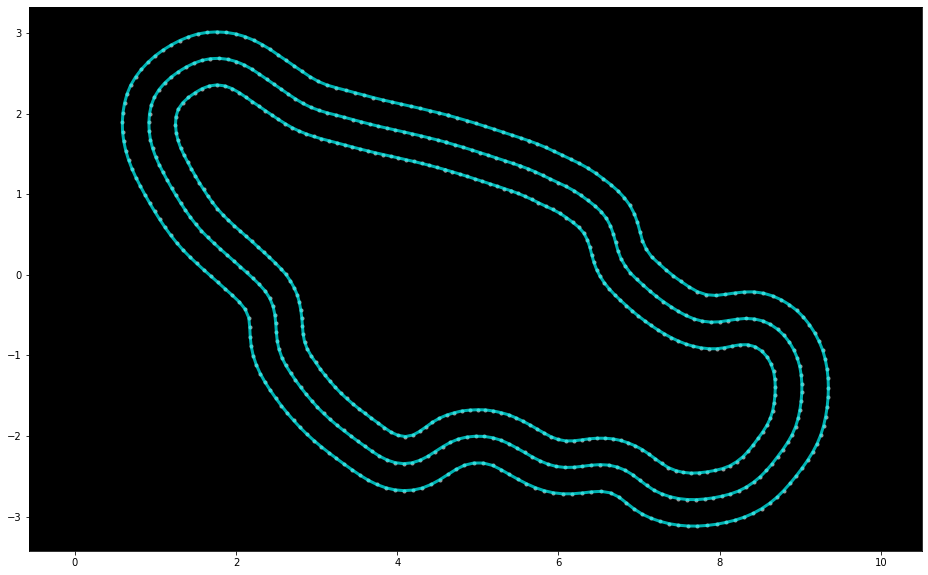
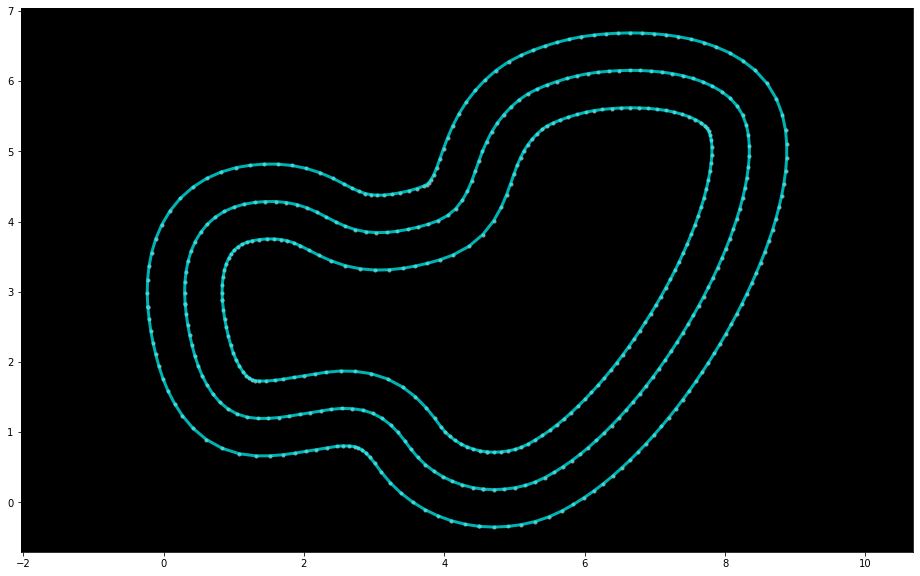
Much better results!
CCRF map ~ 5m sections:

- TODO: Generate optimal (min curvature, min time ..etc) racelines offline and use as target
- TODO: Try this code, looks good but doesn’t seem to be time-optimal
https://github.com/cdthompson/deepracer-k1999-race-lines/
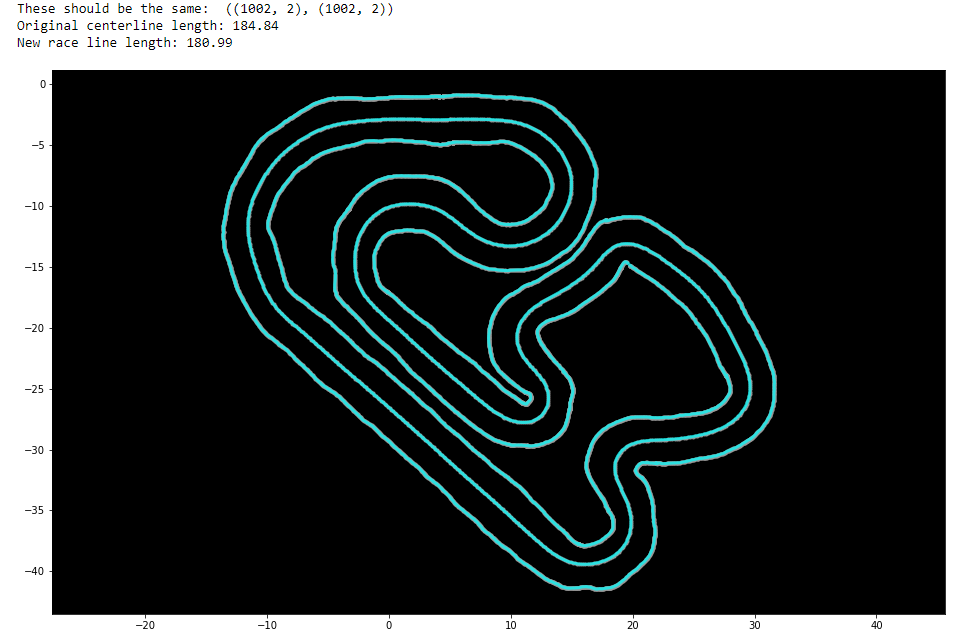
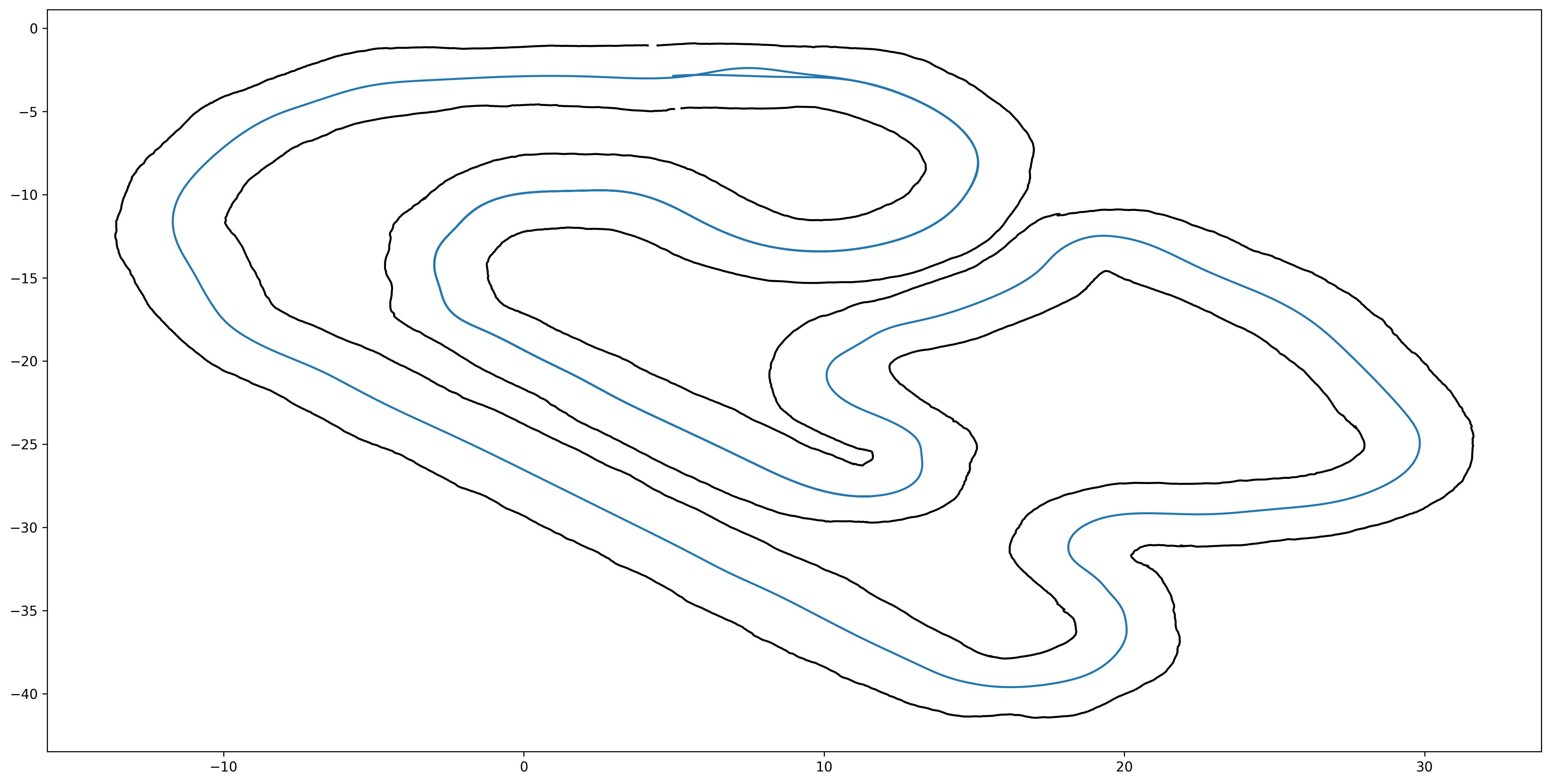
Original Track Calculated Race Line Numpy coordinates NumPy: Canada_Training Python Code: Canada_Training.py NumPy: reinvent_base.npy Python Code: reinvent_base.py NumPy: reinvent2019.npy Python Code: reinvent2019.py
Apr, 23
- Raceline isn’t very different from centerline!
- TODO: add max velocity as constraint for CVXGEN
- Equation from Velenis, E., and Tsiotras, P., 2008: Vmax = Fn_max * sqrt(R/m)
- TODO: what component can calculate Fn_max for the controller? (for now add it as a configurable parameter)
Apr, 24
- TODO: generate reference track for TUMFTM / global race trajectory optimization
Apr, 25
- TODO: commit all changes and merge with Jacob’s new map.
- Good results from Jacob with new curvature values
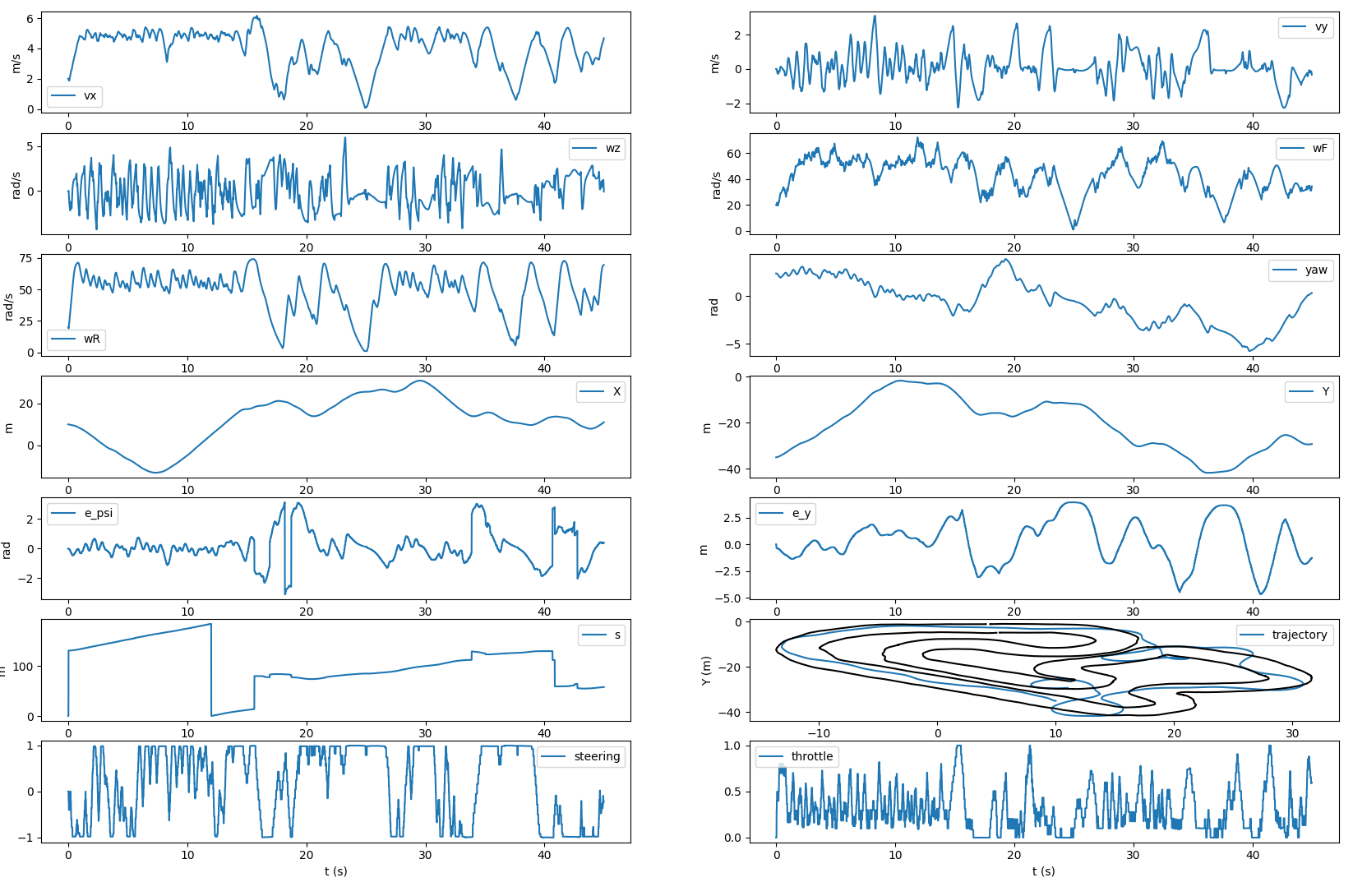
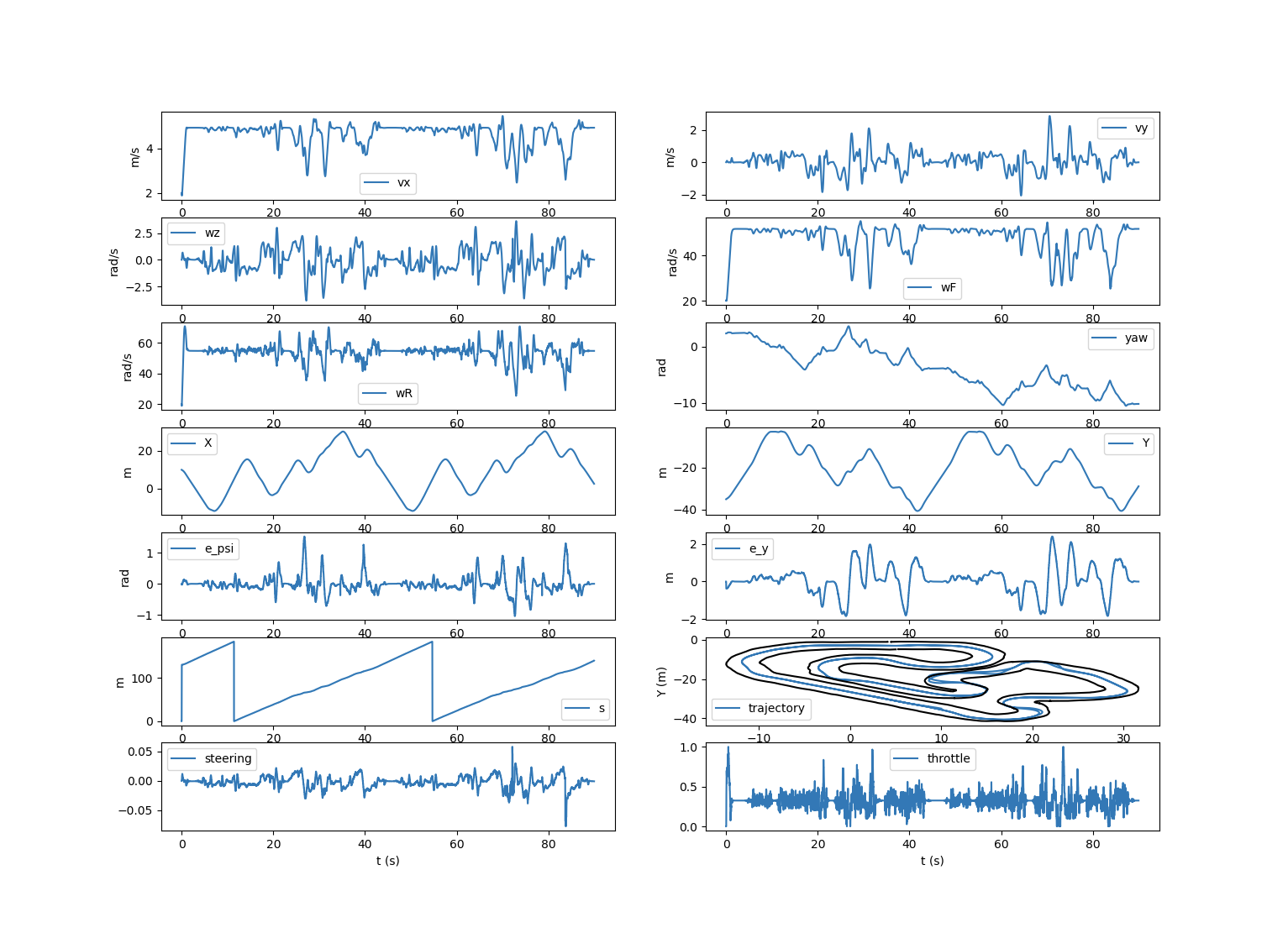
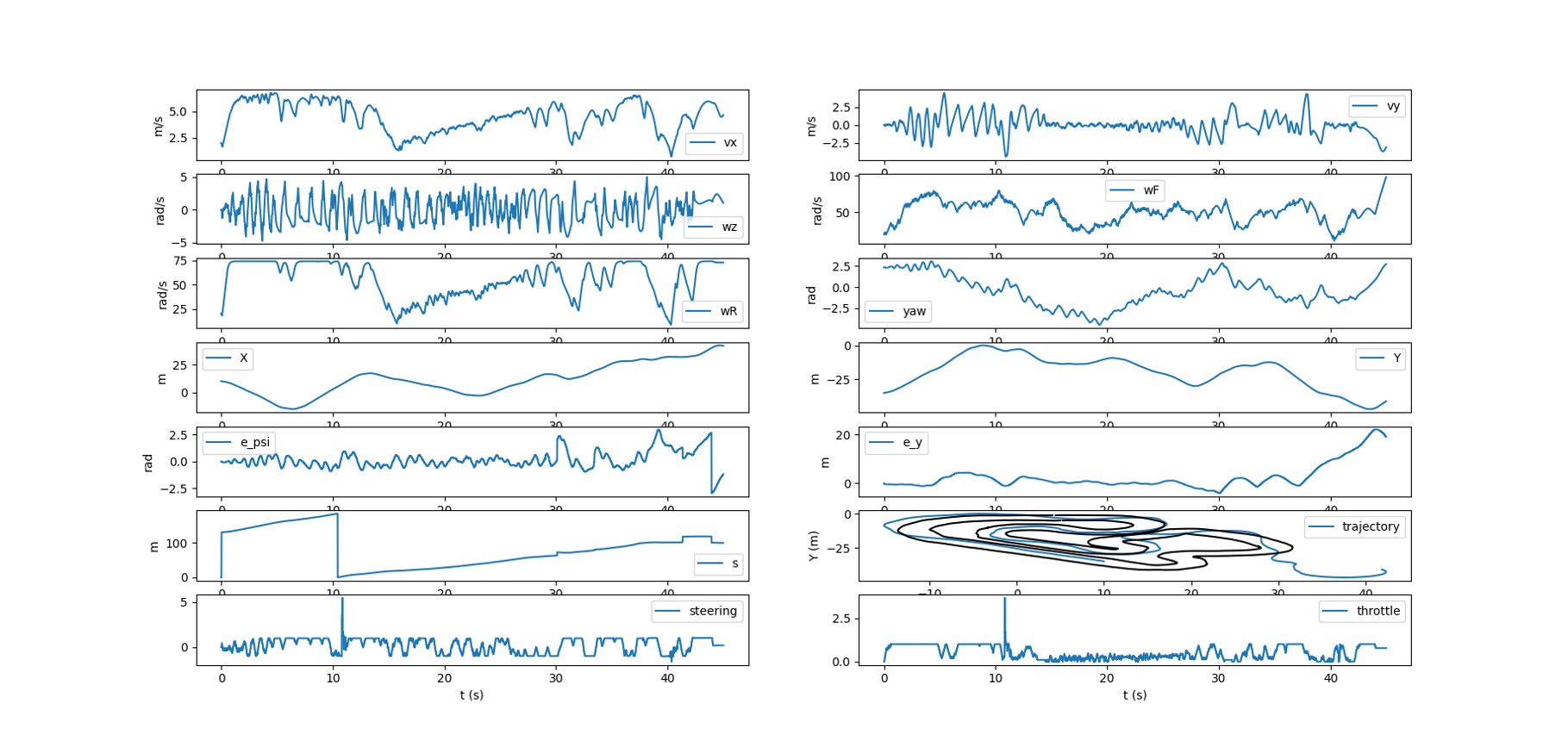
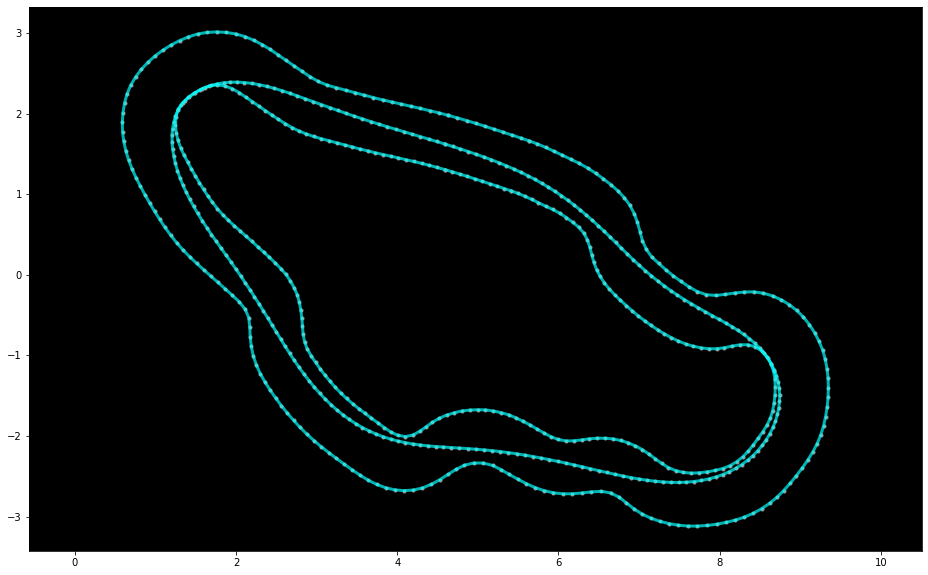
Results on J. Knaup’s machine - target velocity 5 m/s:
Weights: default baseline - Terminal weight = 0
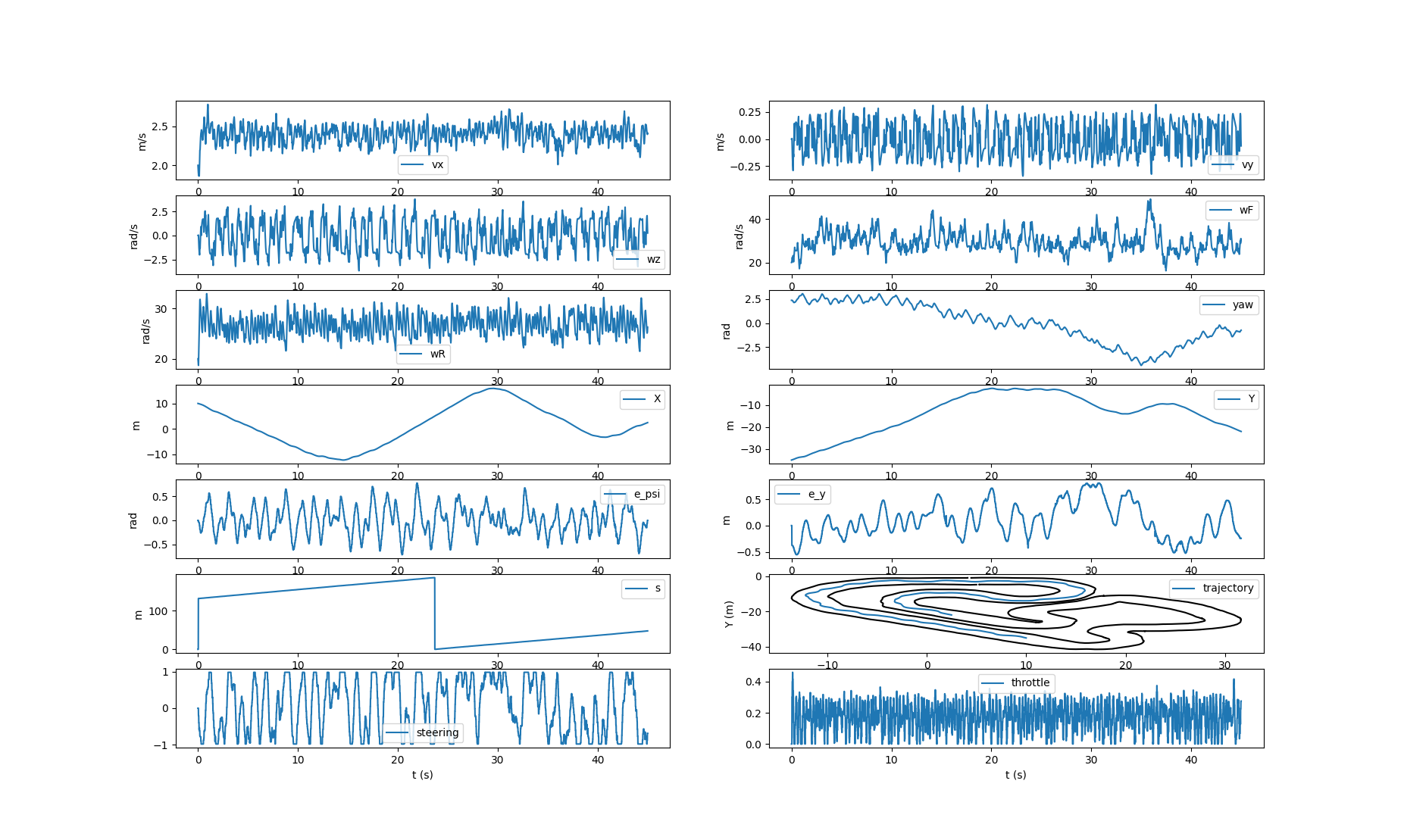
Results on J. Knaup’s machine - target S:
Most imp. weights:
| Vx | 0 |
| Vy | 0.1 |
| ey | 0.1 |
| Terminal S | 50000 |
| Terminal others | weight * 1000 |


Apr, 26
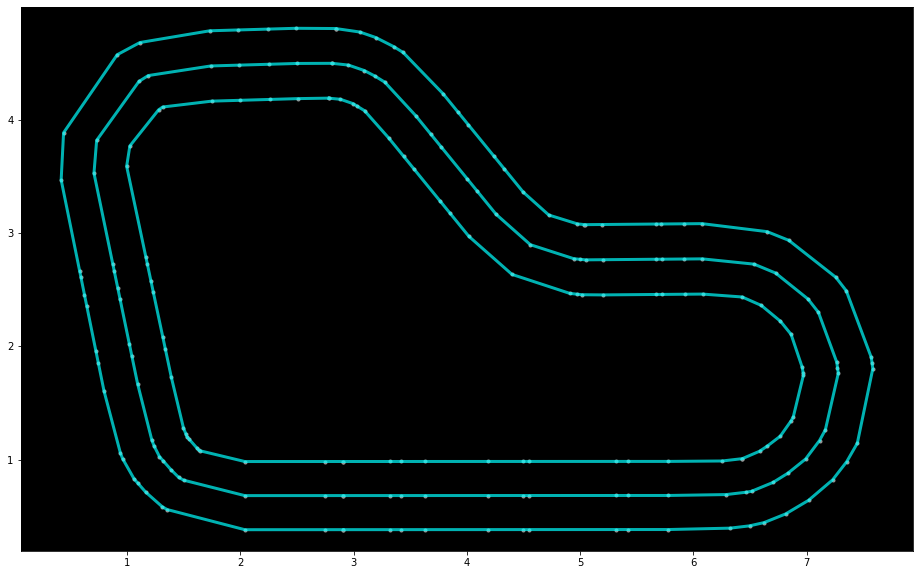
- Re-generate results from clean repo to ensure nothing was missed, closedown.
- All Weights: default baseline - Terminal weight = 0
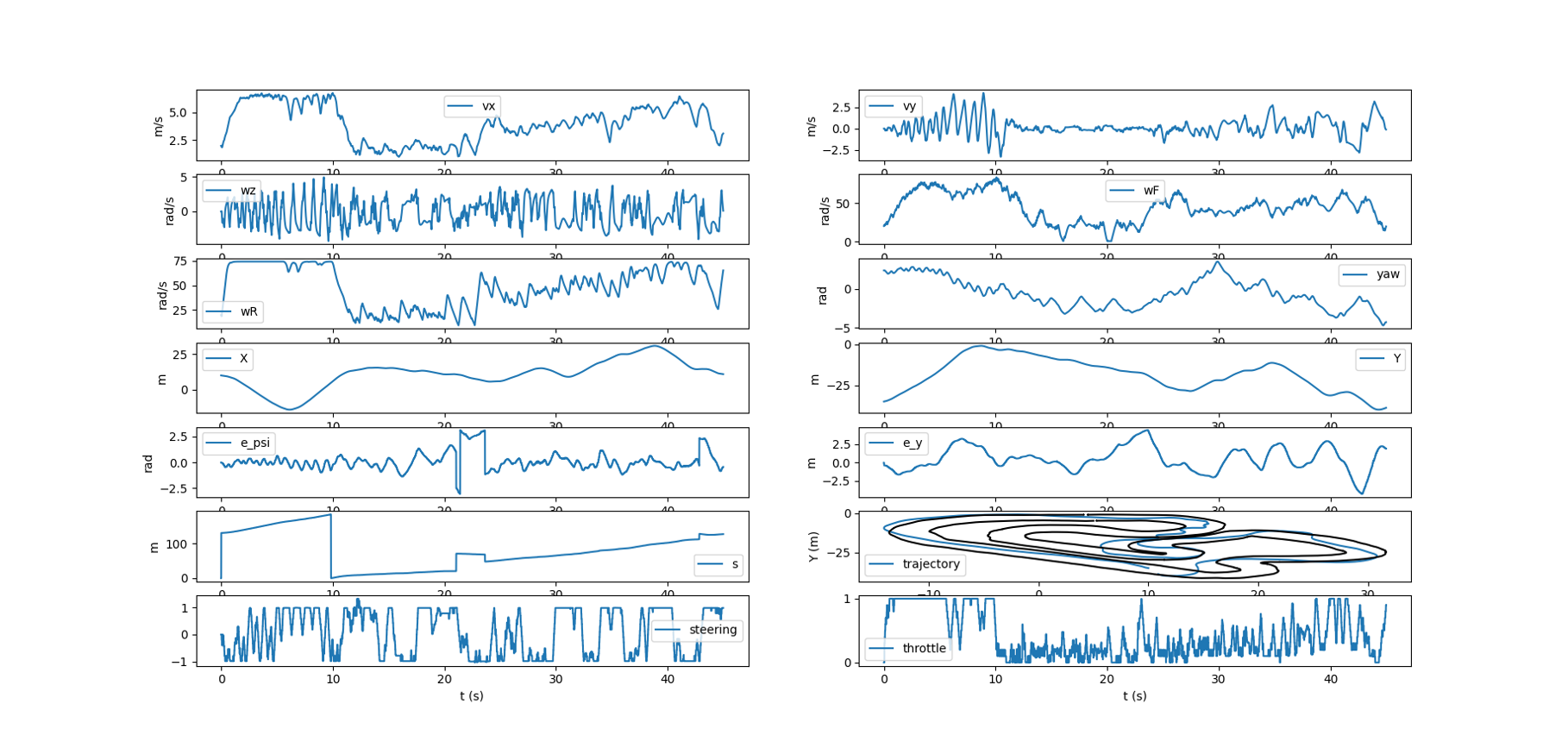
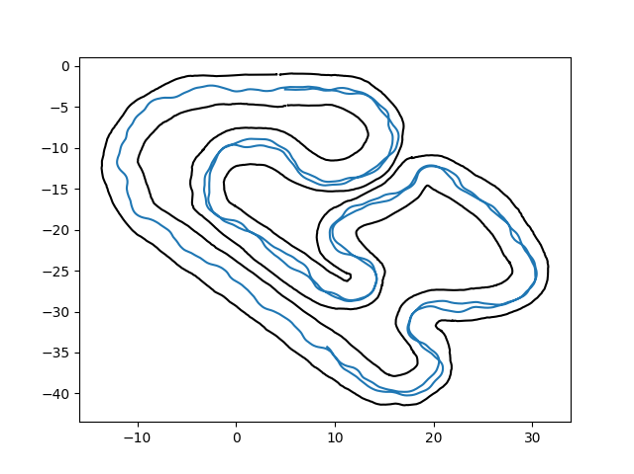
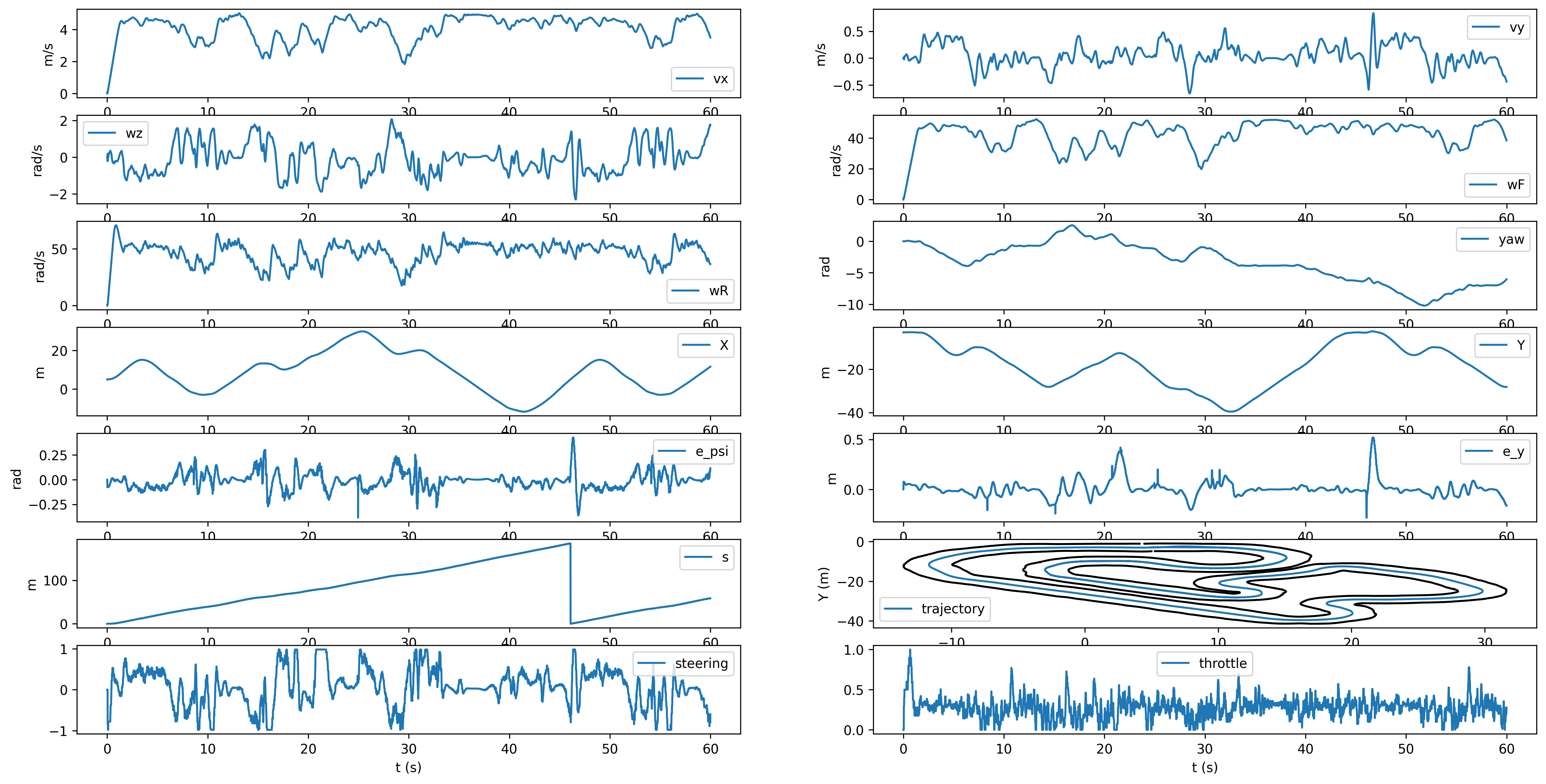
Target speed 5 m/s without Vmax constraint
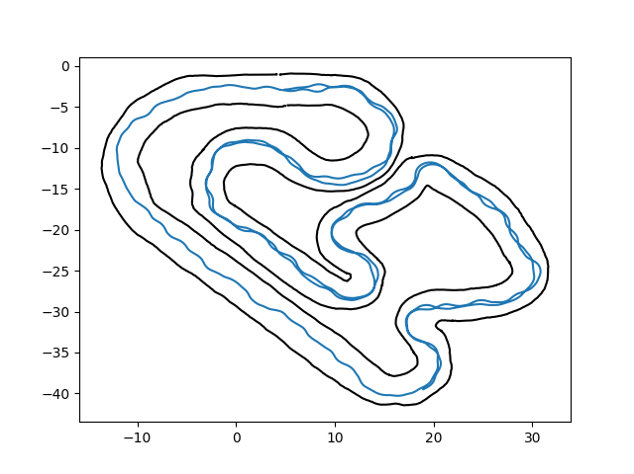
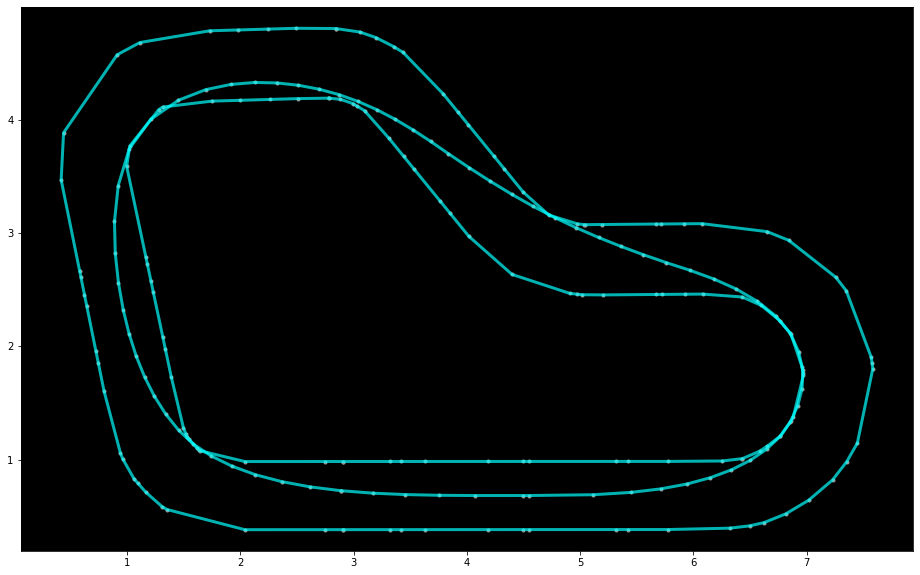
Target speed 5 m/s with Vmax constraint (Fn_max = 10.0)

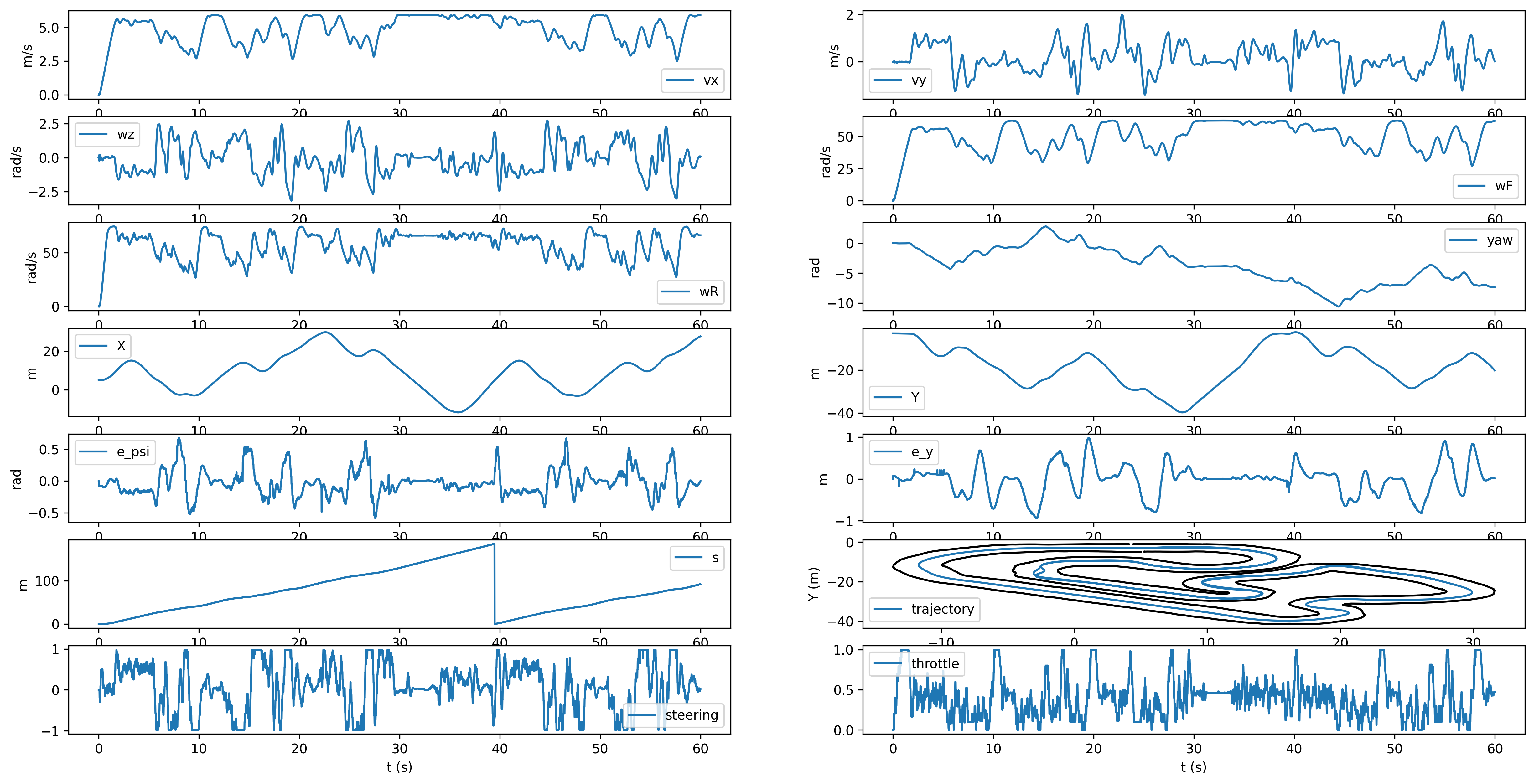
Target speed 6 m/s with Vmax constraint (Fn_max = 10.0)
Conclusion
- Scope of work expanded significantly compared to original goal, but was great learning experience
- Main goal achieved: LTVMPC controller can achieve much faster lap times now, with improved options for expirementation and tuning
- Further work can make use of offline raceline optimzation